Despite the availability of GPS and inertial measurement units, the compass in an electronic fluxgate implementation is still a viable and needed navigational tool.
The classic magnetic-needle compass is not getting much respect or attention these days. Between the Global Positioning System (GPS) and the Inertial Measurement Unit (IMU) system, the compass – whether it is a traditional magnetic needle, or an electronic, no-moving-part version – seems like a redundant and unneeded navigation tool.
Maybe, or maybe not. Consider this quote from a Wall Street Journal profile of Surface Warfare Officer Lt. Katelyn Davidson. She’s responsible for driving the aircraft carrier USS Carl Vinson (yes, the captain gives the orders, but implements then and has to maneuver to get the carrier on course and to its objective, both on the open sea and close-in situations. In the profile, she says, “As a surface warfare officer, I actually drive the ship. So to figure out a contact’s distance, course and speed, I use a compass and maneuvering board paper a lot. We still employ this method because there’s a ton of research to suggest that relying only on our electronic and radar equipment isn’t necessarily the best way to be precise. So it behooves us to have that redundancy. And, also, in the event that there’s a warfare environment where signals are degraded, you need to be able to do it the analog way—just in case.”
This FAQ will look at the fluxgate compass, an electronic version of the magnetic-needle compass, Figure 1.
Q: Why can’t a ship (or aircraft, or car) just use GPS and IMU?
A: GPS can be spoofed, interfered with deliberately, or suffer outages due to electrical storms and lightning. Also, a GPS shows position (as its name indicates) so it cannot indicate heading (direction) unless the vessel is moving, which it may not be — and you don’t want to start in the wrong direction and then have to make a turn when you are driving an aircraft carrier. (GPS can derive heading once it has two distinct location pints, of course, but one you are stopped, it can show if you have turned in place.)
Gyrocompasses do indicate heading, but they have moving parts and their technical performance is better suited for shorter-term navigation rather than long-term. While IMUs are absolutely immune to any sort of external interference (after all, they are inertial), they also excel at showing motion (velocity and acceleration) rather than heading, whether they use the mechanical gyroscope, fiber-optical laser, or MEMS-based techniques.
Q: So why is a magnetic compass different?
A: The earth’s magnetic field is not powerful, but it is pervasive. It’s almost impossible to externally spoof or interfere with it. The only way to keep an instrument from sensing the field is to create a special shielded room. Of course, the field is distorted b the metal of a ship, for example, so a one-time correction and calibration is needed for a given installation location in that particular ship.
Q: Magnetic sensing and compass heading sounds straightforward, but is it?
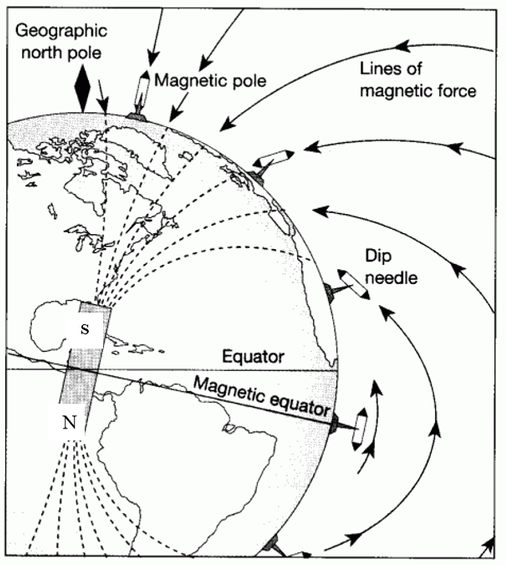
A: Actually, no. First, the Earth’s magnetic field is not aligned with the North and South poles and axis. Further, the field alignment actually drifts over time, so regular corrections are sent to the navigation system. The field is also not parallel to the Earth’s surface; it has both horizontal and vertical components and these must be taken into account by the compass-based direction-sensing system, Figure 2.
Q: So what’s a fluxgate compass?
A: Unlike the magnetized-needle compass of historical legend (and still widely available) or the gyrocompass which indicates heading via a gyroscope-based gimballed platform, the fluxgate compass (sometimes written as “flux-gate”) is an all-electronic, compass without moving parts (although it may also be gimballed).
Q: Is a fluxgate compass the same as a fluxgate magnetometer?
A: No, but they are similar and share underlying physics and magnetics principles. The magnetometer measures magnetic field magnitude (scalar), but not its direction (vector); the compass, by definition, indicates the direction (heading).
Q: Is the fluxgate compass a new development? If not, are they still in use?
A: Fluxgate compasses were practical from the 1920s since they are based on well-known magnetic, non-electronic principles. Early fluxgate compasses used vacuum tubes for excitation and amplification, and were therefore large, power-hungry systems. Nonetheless, they were deployed extensively in WWII aircraft, as you can see from the “calibration” notes for a B-17 version (Reference 1). Of course, that size/weight/power issue has changed with the development of transistors, ICs, and other modern technologies, and now they are small, light low-power units. Many small aircraft use them due to their performance and reliability, and newer ones with an embedded processor simplify all aspects of the operation.
Q: So, what’s the operating principle and arrangement?
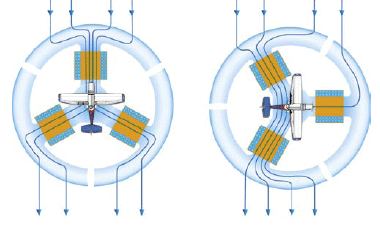
A: A typical fluxgate compass has three small coils of wires, each wound around a core of highly permeable magnetic material. They are arranged as evenly spaced spokes, to directly sense the direction of the horizontal component of the Earth’s magnetic field. One coil is driven by an AC waveform (typically, 400 Hz but can be higher), and the other two are used as sense coils. When the sense coils are aligned with the external magnetic field, the voltage induced on each by the driven coil is balanced, and there is no net output, Figure 3. However, as the alignment with the external field changes, the magnetic flux induced in the two coils becomes unbalanced, and the magnitude of this analog difference indicates the direction of the external field with respect to the external field.
Q: What accuracy can be achieved with a fluxgate compass?
A: As usual, the answer is “it depends” but a properly set-up and calibrated unit can do better than 1⁰.
Q: What does a complete fluxgate compass look like?
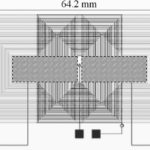
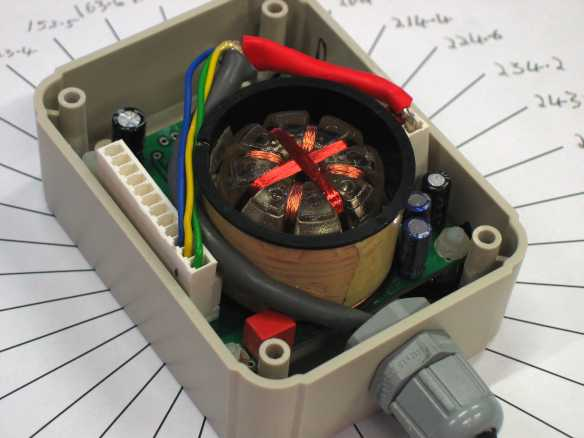
A: The entire unit can be housed in one box, or more commonly, the magnetic sensing coils and their drive/amplifier electronics are in one box, Figure 4, and this is connected via a cable to an analog or digital readout via a cable, Figure 5. This allows the placement of the units in an optimal location for each.

Part 2 of this FAQ looks at fluxgate-compass error sources. modern implementations, and technical advances.
References from EE World Online
- GPS, Part 1: Basic principles
- GPS, Part 2: Implementation
- How can you improve the next-generation IMU?
- Inertial Measurement Units: The hidden key to Apollo success, now a MEMS device (Part 2)
- Inertial Measurement Units: The hidden key to Apollo success, now a MEMS device (Part 1)
- Precision six-axis inertial measurement unit comes in a small package
- What happens to an MCU if there’s an EMP or Solar Superstorm? Part 1
- The first undersea transatlantic cable: An audacious project that (eventually) succeeded, Part 1
- The first undersea transatlantic cable: An audacious project that (eventually) succeeded, Part 2
- Engineering the atomic submarine, Part 1: One man’s audacity, determination, dedication revolutionized naval reality
- Engineering the atomic submarine, Part 2: One man’s audacity, determination, dedication revolutionized naval reality
Other References
- Ohio History Connection Selections, “Operation of the Flux Gate Compass in B-17 G”
- IEEE Sensors Journal, “Magnetic Sensors and Their Applications,”
- Texas Instruments, SSZY030, “Achieve greater precision, reliability with integrated magnetic sensing technology”
- Imperial College London, Space and Atmospheric Physics, “How a fluxgate works”
- TMQ Europe, “What is an electronic compass with gyro and why do you need one”
- IEEE Transactions on Vehicular Technology, “Automobile navigation using a magnetic flux-gate compass”
- IEEE Transactions on Magnetics, ”Development and Comparative Analysis of Fluxgate Magnetic Sensor Structures in PCB Technology”
- net, “Compass & Fluxgate Magnetometer Projects”
- MIT 6.101 Final Project Report, “Fluxgate Magnetometer”
- Arriba blog, “Tech: The fabulous fluxgate compass”
- AutoNav Marine Systems Inc., “Compass Considerations, for Steering and Autopilots”