

Part 1 of this FAQ looked at the basic concept of active noise cancellation, how it might be implemented in principle using analog circuitry, and the harsh reality of actually providing the ANC function. Part 2 looks at modern ANC systems and how they function, as well as their practical issues. Q: Is ANC using […]
basics
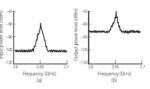
RF/Microwave noise, Part 2: Noise temperature and applications

Part 1 of this FAQ looked at the basic specifications of noise factor and noise figure, widely used in RF/microwave system and circuit analysis to predict and assess both requirements and performance. This part looks at the additional parameter of noise temperature, as well as the impact this parameter has on system performance. It also […]
RF/microwave noise, Part 1: Noise figure basics
The lower-frequency world of electronic circuits and systems for communications links routinely uses parameters such as voltage and current, bit rates, and signal/noise ratio, to cite just a few of many, many possibilities. While these are also important in the world of RF and microwave links and system functions, engineers doing work in this arena […]
Load pull for RF devices, Part 2: How and where
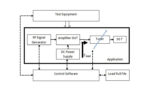
Part 1 of this FAQ explained the what and why of load-pull tests of RF devices and impedance matching. Part 2 looks at various ways the test can be set up and run. Q: What’s the basic test setup for a modern load pull? A: As shown in the figure of Part 1 (and repeated […]
Load pull for RF devices, Part 1: What and why
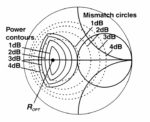
Impedance matching between RF stages has always been a priority to ensure maximum transfer of RF power along with minimal RF-power reflections. Although most RF systems are designed for nominal 50-ohm input and output impedance (and 75-ohm for cable TV), the reality is that many components do not present that preferred 50-ohm impedance due to […]
Gyroscopes, Part 2: Optical and MEMS implementations
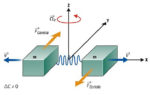
Part 1 of this FAQ examined the basics of IMUs based on spinning-rotor gyroscopes to establish and maintain a fixed attitude via a gimbaled platform, along with orthogonal accelerometers to sense motion along each axis. Part 2 looks at optical and MEMS-based gyros which have largely replaced the spinning-rotor core function except in the most-demanding […]
Gyroscopes, Part 1: Context and mechanical designs
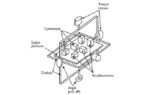
We now take as a “given” the ability to know where we are and where we are going, and do both with accuracy and precision (and with simplicity and low cost, but these are relatively recent developments. Prior to the availability of inertial measurement systems based on gyroscopes and accelerometers, navigation was a time-consuming, difficult, […]
Network topologies, Part 2: Advanced interconnections

Part 1 of this FAQ started out with conceptually simple, widely used, and indispensable point-to-point and bus topologies often implemented using RS-232, RS-485, and Ethernet standards. These basic topologies are suitable in many situations but are inadequate as the number of nodes increases, or as other performance issues become priorities. Part 2 looks at other […]
Network topologies, Part 1: Basic interconnections

A network can be a simple and direct as a connection between just two points (nodes), or it can incorporate tens, hundreds, thousands and even more nodes. How these nodes are connected, how the network functions under ideal and stressed situations and traffic levels, and the key attributes of each network configuration is largely defined […]
Microwave/Millimeter Wave interconnects, Part 2: Connectors and cable assemblies

Part 1 of this FAQ look at the coaxial cables used in microwave/millimeter wave interconnects and cable assemblies. But a cable alone is only half a solution; the cable must be terminated with connectors. Often, the completed cable/interconnect assembly is also called a cable, but this is generally not an ambiguous situation (but it may […]