
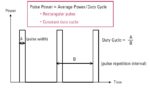
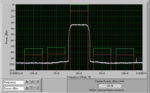
Part 1 of this FAQ introduced some of the basic issues related to the measurement of RF power, which is a primary parameter in most RF designs. Part 2 continues the discussion, looking at RF waveforms and sensors. Q: The term “power” is fairly broad; what are the specifics? A: There are actually several basic […]
FAQ
RF power measurement, Part 1: Why and where
When the subject is RF design, the word “power” dominates much of the discussion. This FAQ looks at some perspectives related to the measurement of this vital RF parameter. Not only is power and measuring it among the most important RF design considerations, but it is also generally difficult to assess accurately, and it is […]
The RF power amplifier, part 2: considerations

Part 1 of this FAQ looked at the basic role and function of the RF power amplifier (PA). This part looks at some of the factors to consider when looking at possible PA devices. It is not a detailed run-through of the many parameters which characterize PAs, including many which are unique to the PA […]
Rotary encoders, Part 2: magnetic encoders
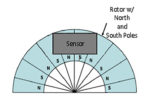
Part 1 of this FAQ looked at the optical rotary encoder, a low-cost, high-resolution, easy-to-use sensor for indicating incremental shaft position (although it can be “upgraded” to indicate absolute position as well). Q: What is the basic principle of the magnetic encoder? A: The magnetic encoder uses a rotating gear made of ferrous metal and […]
Rotary encoder basics and applications, Part 1: Optical encoders
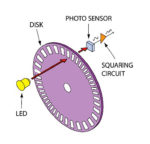
Across a wide range of applications, it is necessary to need to accurately sense the motion of a rotary shaft and know its position, speed, or even acceleration. To do this, a component called a shaft or rotary encoder is added to the motor/shaft assembly. (Note that the term “rotary encoder” is often shortened to […]
Signal-channel diversity and fading, Part 2: Frequency Diversity

In Part 1 we looked at space diversity, which is the simplest form of signal-channel diversity. It has been used with success since the earliest days of wires and wired links, and it sees new uses in 5G MIMO and other advanced RF systems. We next look at the other very common form of signal-channel […]
Radio receiver architectures, Part 2—Zero-IF and SDR

Part 1 of this FAQ looked at two basic receiver architectures: the tuned radio frequency approach (now largely obsolete due to performance shortcomings), and the superhet design which has been used with great success for about 100 years. Part 2 looks at two other architectures – the zero-IF design and the software-defined radio – which […]
Solid-state temperature sensing, part 2: application
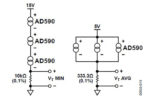
In Part 1, we looked at the basic principle and function of the solid-state temperature sensors, as well as the first widely available model, the AD590. Part 2 looks at some application considerations. Q: What are the interface considerations? A: A basic solid-state sensor has a PTAT current-only output. This means that the subsequent circuitry, […]
Solid-state temperature sensing, part 1: principles

Temperature is by far the most commonly measured physical parameter in industrial, commercial, and even residential settings. It’s obviously about much more than just “what’s the temperature, so I will know what coat to wear?” Temperature readings are needed to control processes and systems via a negative feedback loop, PID algorithms, and comparators (References 1 […]
Common emitter circuit for analog signal amplification

Today’s microcontrollers are crammed with useful features that have obviated the need for going off chip in order to gain useful functionality. So-called “system-on-chip” or SoC platforms have streamlined product development cycles. They have done this by allowing engineers to spend more time focusing on value-added work and less time on the more mundane glitches […]